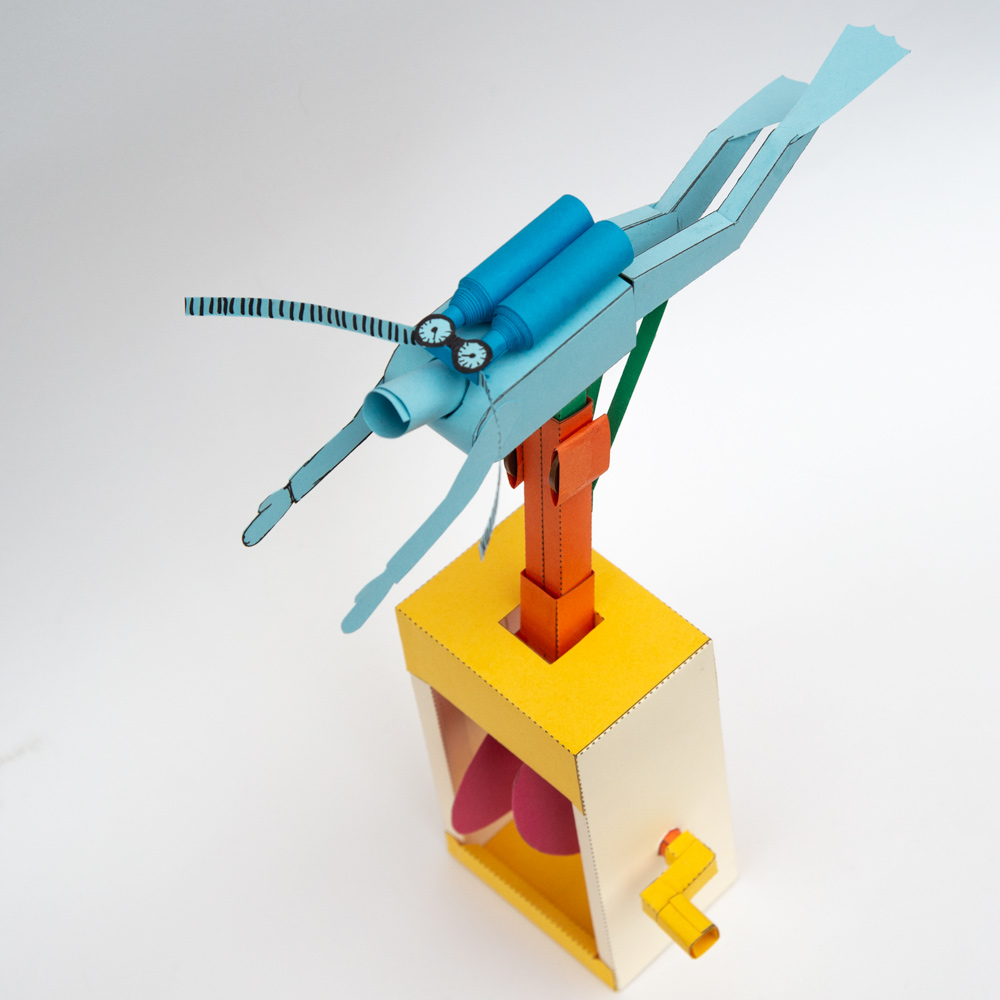
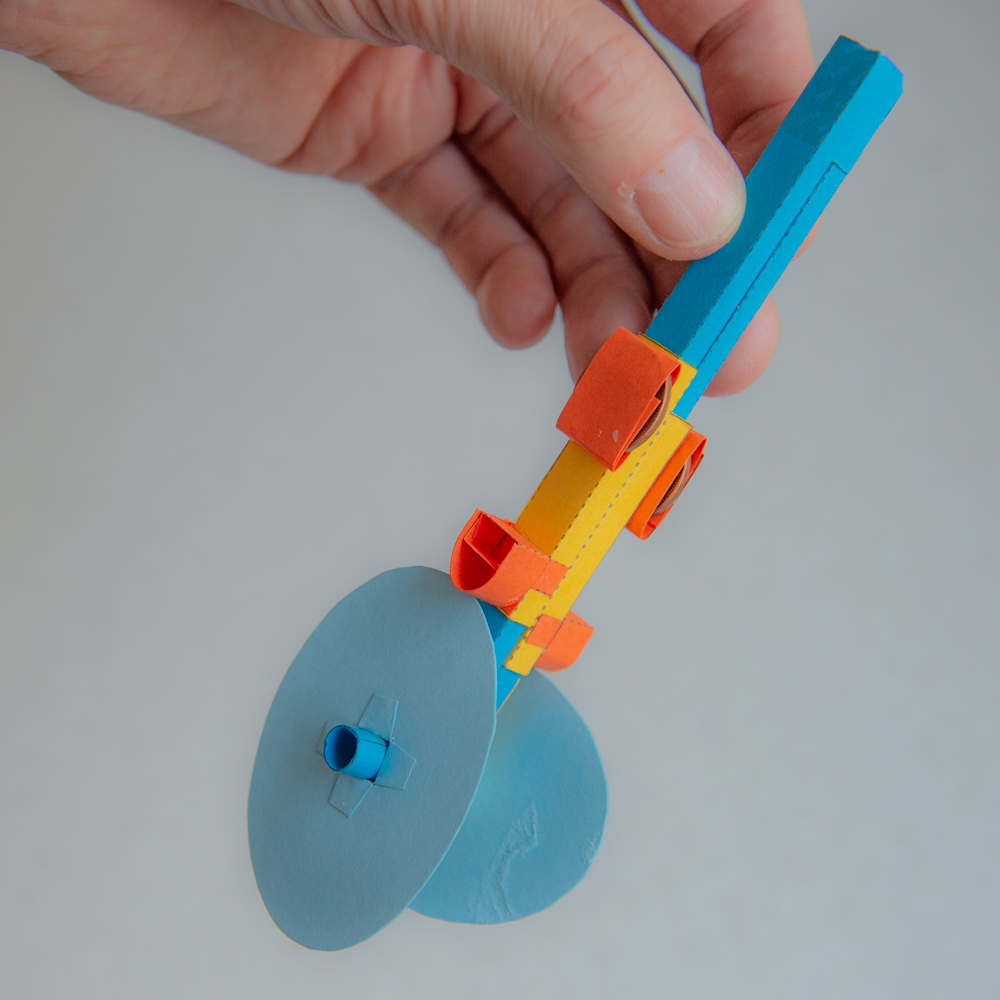
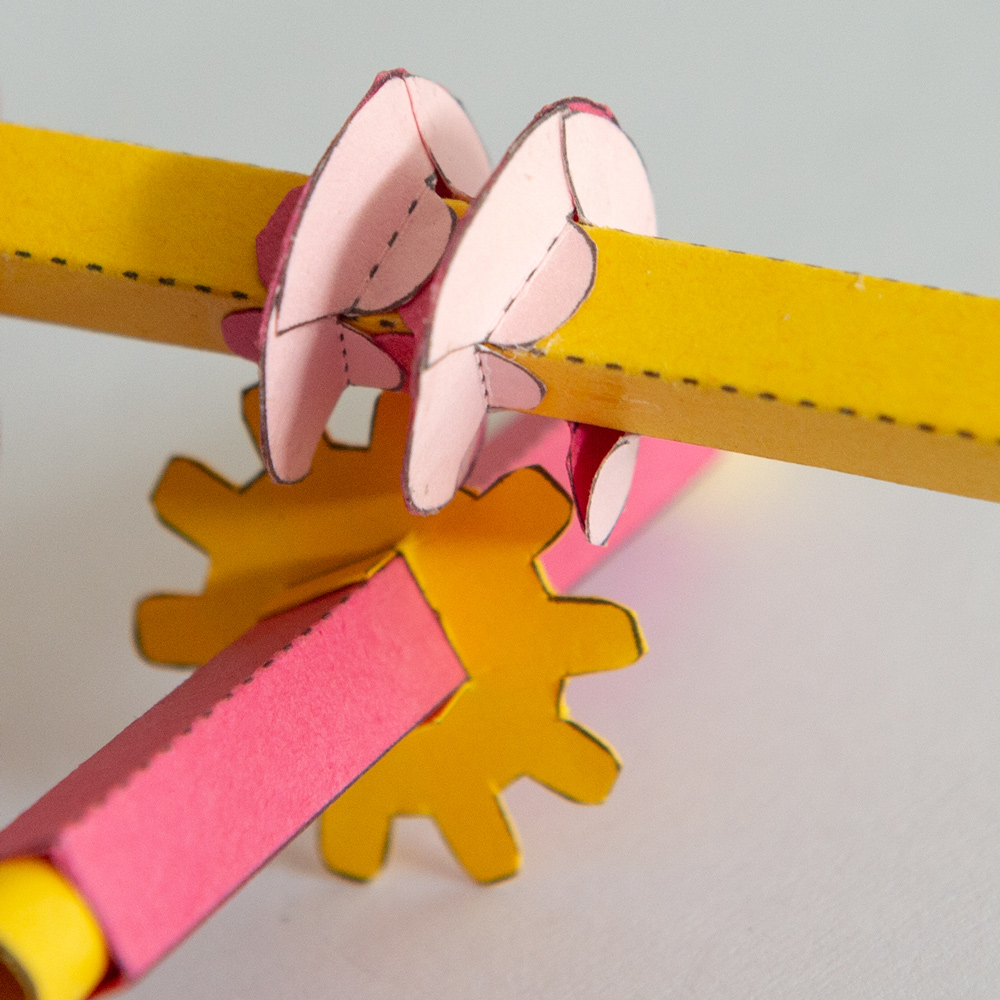
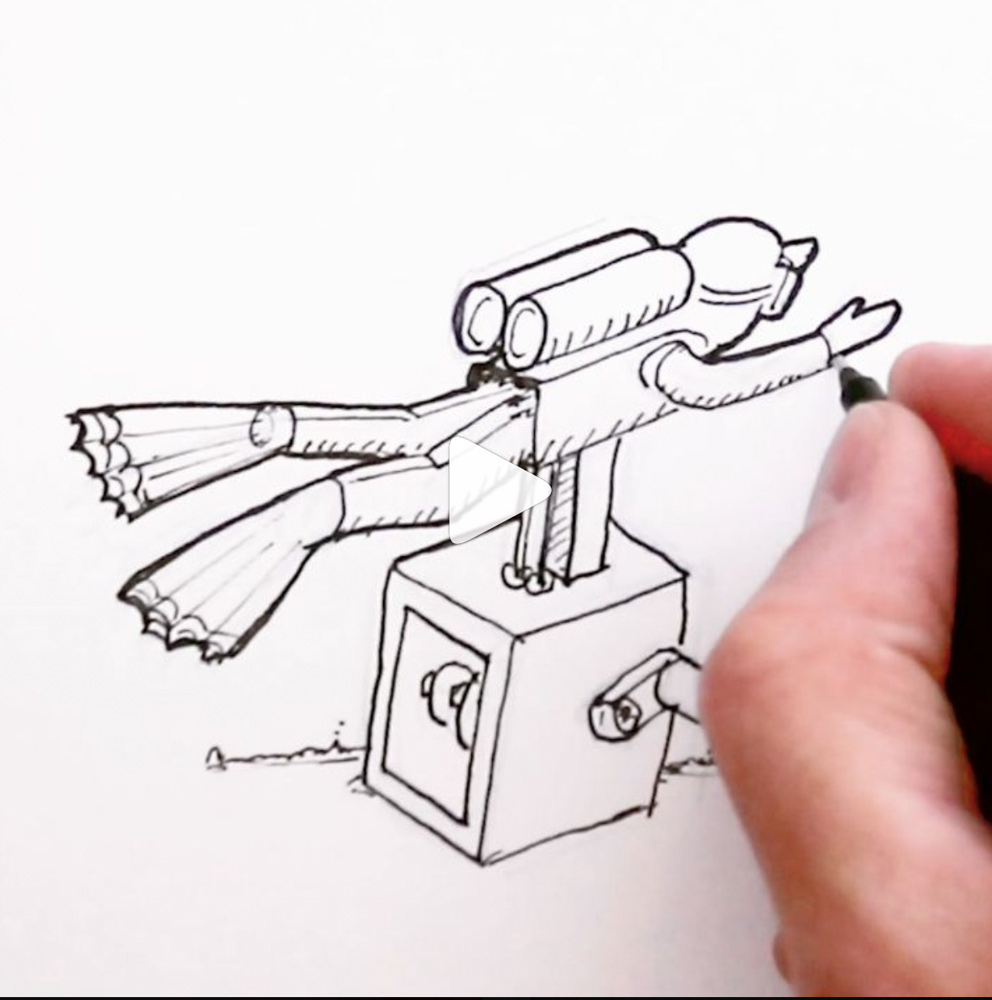
Animation Mechanism Prototype View this post on Instagram Mechanical animation idea. Based around Read More