
I'm working on an articulated version of the paper-rob model. Unsurprisingly I've found myself distracted and working on a slightly different project. I'm now trying to make a model with elbows, hips, knees and elbows. I had originally intended to use a simplified version of the two axis joint but have moved towards a design based on the rotating joints used in the lever book.
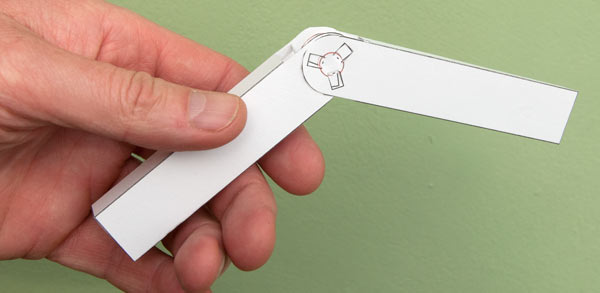
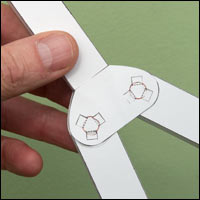
One part of the hinge has a circular hole, the other has three tabs which slot through the holes. It works nicely in that it is easy to move and stays in the position in which it is posed.
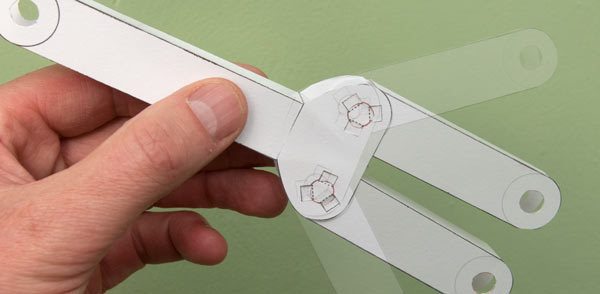
By adding two sets of holes to the end of a shaft I've made a set of working hips.
Shoulders next
