

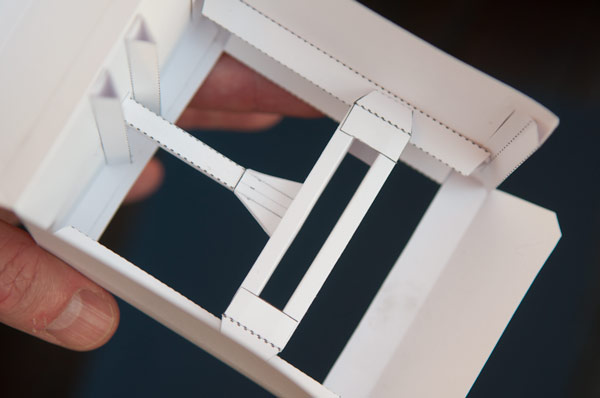
I've finished the scotch yoke part of the robot model. The sliding yoke fits nicely in the box. (See the previously post) I'll be publishing the base mechanism as separate project before continuing with the robot.
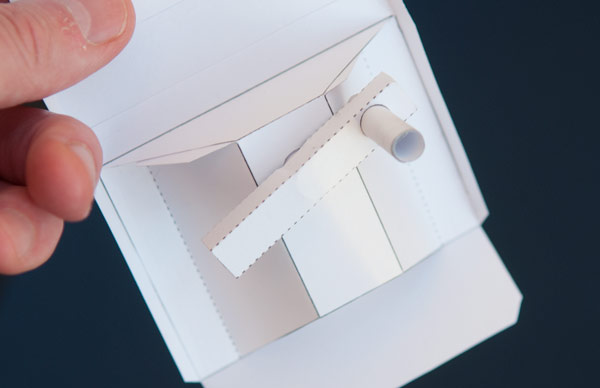
The drive handle and drive pin fit into a back plate on the box.
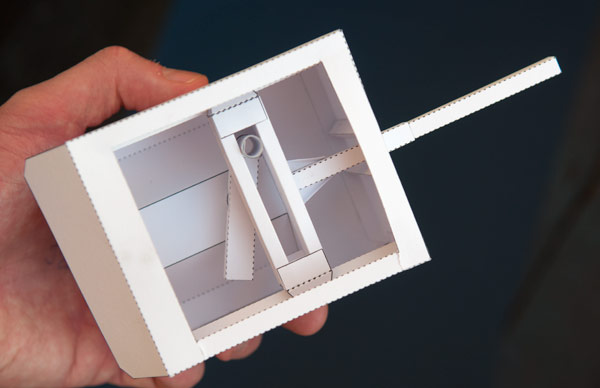
Everything fits together to complete the mechanism.

I've printed out parts onto coloured card and will be putting together them together in the morning.
—–
